
Demonstration of conflict free intersection of dense drone traffic
Engineers from the University of Manchester demonstrate the world’s first conflict free intersection for drone transport networks at the CASCADE Collaboration Workshop July 2022.


As the UK and the world moves toward future cities with drones performing tasks every day such as delivery, inspection and emergency response, the problem of dense urban air traffic will begin to present itself. While drones and personal air vehicles will open up a whole new 3D space in the sky, in order to make use of this for efficient traffic management, high level distributed control algorithms need to be developed and tested in realistic outdoor environments.
Currently experimental validation and testing of novel flight rules developed in simulation is particularly difficult. Researchers must integrate various available open source tools for communication, interfacing with autopilots and real time monitoring before they can test their high level algorithms. There are isolated examples of successful distributed multi UAV experiments in outdoor environments (Vásárhelyi et al. 2018) however no assistance is given to researchers to repeat the experiment. Many more experiments have been conducted indoors where external factors don’t need to be considered and accurate positioning is easier (Giernacki et al. 2017), (Preiss et al. 2017). Due to the extra time and resources which must be devoted to creating a generalised framework for distributed multi UAV experimentation, thus far researchers have generally only produced bespoke solutions for their own experiments.
The Helix Framework lowers the barrier to entry for realistic, outdoor multi UAV experiments by providing an easy to use interface for high level multi agent distributed control algorithms along with all the necessary supporting services. The framework takes care of communications and interfacing with the vehicles using various open source tools along with providing an Android and Linux app to control experiments. Researchers can write their own custom experiment code which interfaces with the framework and runs on the onboard computer of each UAV, enabling them to test their distributed high level control algorithms without worrying about all the behind the scenes systems. The framework can be used with PX4 SITL and the Gazebo simulator to test distributed control algorithms in simulation before carrying out real world experiments. Detailed documentation is available to assist users in writing experiments that interact with the provided services.
Each agent is equipped with a flight controller running the PX4 open source flight control software along with a Linux based onboard computer for onboard processing of distributed control algorithms. Communication between agents and with the ground control app is via WiFi using MQTT, an open source real time publish and subscribe network protocol.
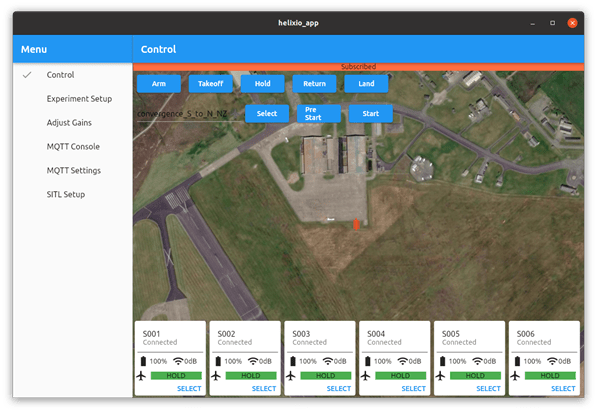
The Helix Framework ground control app allows users to command the swarm of UAVs, start and stop experiments and monitor them in real time. The app is built with Flutter, a multi platform development framework that enables a single codebase to be used for iOS, Android, Linux and Windows.

At the CASCADE Collaboration Workshop 2022 a team from The University of Manchester successfully implemented a distributed rule based system for conflict free intersections using the Helix Framework. The experiment demonstrated findings from simulation that helical transport surfaces can be joined in such a way that both merging and demerging traffic is conflict free. This is due to agents always being able to converge and diverge out of plane. The demonstration was carried out with 7 UAVs shown in Figure 3 and a long range 2.4GHz WiFi Access point for communications. For added safety, redundant communication and control methods were included.



There were a number of problems encountered during the demonstration which can only be identified and solved during real world testing. These included intermittent communication connection, UAVs not responding to commands and hardware failures leading to more than a few crashes. These problems were identified and solved during testing leading to improvements to the framework. A full table of issues, their possible reasons and the solutions that were implemented to overcome them is shown in Table 1.
| Problem | Possible Reason | Solution | Outcome |
| Aerial robot unresponsive to all communication channels | a) Corrupted geofence causing auto return to geofence | a) Always re-upload geofence before flight/don’t use flight controller geofence | No further unresponsive aerial robots |
| Commands not being executed by aerial robots | a) WiFi Link failed – aerial robot disconnected b) Command not received by aerial robot c) Command not sent from GCS | a) Added directional AP for better connectivity b,c) Added a check function to see if command had been actioned yet, if not send command again | Communications became more robust Reliability of agents executing commands increased significantly |
| Uncommanded recalibration, arm and throttle up in lab | a) Spurious PWM command from flight controller to ESC on startup b) Spurious PWM command from battery being plugged in c) Malfunctioning ESC | a) Replaced flight controller on aerial robot and changed ESC communication protocol to DSHOT b) Listened for recalibration tones on startup, if heard, unplug the battery immediately c) Replaced ESC | No further uncommanded re-calibrations, arming and throttle ups occurred |
| Aerial robot flip on take off | a) Wind gust as aerial robot became airborne b) One of the legs being caught in a groove | a) Reduced acceptable wind threshold for experiments b) Ensured aerial robots were not positioned in grooves between experiments | No further aerial robots flipped |
| Uncommanded gyration when in hold flight mode | a) Poorly calibrated compass b) Malfunctioning compass | a) Re-calibrated compass b) Replaced compass | Minimal gyration was observed |
| Aerial robot failed preflight check (Error: EKF HORIZ POS ERROR) | a) Optical flow sensor gives poor data at night | a) Turn off optical flow sensors at night | Aerial robot passed preflight checks |
The Helix Framework is still in active development and contributions are welcome on GitHub. Currently the framework uses a centralised communication system with all messages being passed through a central MQTT broker running on the ground control station. However, the framework has been designed in a modular way such that a distributed communication system such as a mesh network can be implemented in the future with minimal changes. Researchers can now make use of the Helix Framework for their distributed multi UAV experiments and focus less on the background services and more on their research.
The Helix Framework is open source and available at https://github.com/CUEDOS/helixio. Extensive documentation can be found at https://helix-framework-docs.readthedocs.io/.
Verdon Crann, Sam Knox, Peyman Amiri, Bill Crowther, The University of Manchester
References
Giernacki, W. et al. (2017) ‘Crazyflie 2.0 Quadrotor as a Platform for Research and Education in Robotics and Control Engineering’.
Preiss, J.A. et al. (2017) ‘Crazyswarm: A Large Nano-Quadcopter Swarm’. Available at: https://github.com/USC-ACTLab/crazyswarm (Accessed: 27 July 2022).
Vásárhelyi, G. et al. (2018) ‘Optimized flocking of autonomous drones in confined environments’. Available at: http://robotics.sciencemag.org/ (Accessed: 27 July 2022).
