
Given the fast rates and spatial scales of anthropogenic effects (e.g. fast global warming), there is a pressing need to measure and predict the dynamics of biodiversity and ecosystems processes, This is particularly relevant for microorganisms such as plankton, which sustain important ecosystem processes (e.g. carbon and nitrogen cycles, energy transfer through food-webs) and services (e.g. water quality, fisheries) locally and globally. Often, these processes are driven by microorganisms, making them hard to monitor and subject to fast changes. There is, thus, a need to develop automated monitoring systems which can be deployed fast and cover large areas.
At Aerial robotics laboratory, Imperial College London, we have designed, a Multi-Environment Dual-Robot for Underwater Sample Acquisition (MEDUSA)1. This is a novel robotic water sampling platform that combines the technologies of multirotors and underwater micro-vehicles. The platform is capable of flying, landing on the water surface and a tethered mobile underwater pod released from the system can collect water samples to depths of several meters underwater. The platform can perform the challenging task of aquatic sampling that otherwise require lengthy motorboat operations or autonomous underwater vehicles. We hope to deploy this system as a cost effective and safe solution with applications in the marine industry, as well as in environmental and infrastructure monitoring.
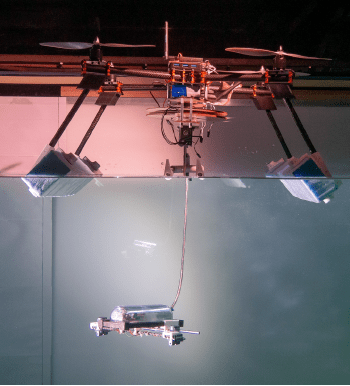
MEDUSA’s flight range is estimated at 1km return and underwater its’ operations envelope is up to 10 meters depth. The system is composed of a standard multirotor, which passively floats on the water surface during the aquatic phase for the mission; and a tethered submersible pod, which is equipped with a sampler.
The submersible pod can acquire up to two independent solid samples by filtering water through GFF filters, collecting sediments and biomass. These samples can be obtained at specific depths, as the depth can be controlled using a variable buoyancy system. Cross-contamination is avoided using no-return valves and a separate purging line. The pod is also equipped with an analogue camera for visual inspection.
In partnership with Eawag, the Swiss Federal Institute of Aquatic Science and Technology, part of ETH domain, Switzerland, it is proposed to fly a drone in a lake in Switzerland and collect the water sample. We recently deployed the MEDUSA drone to collect water samples from freshwater lakes in Switzerland, with the objective of validating the system as a viable alternative for routine operations, with the aim of eventually contributing to the prediction of toxic algae blooms.

The data acquired by drones will be used for biodiversity assessment, automated monitoring, calibration of process models or remote sensing for constant ground-truthing and saving the costs of personnel and time.
