
SailMAV is a novel design concept developed at Aerial Robotics Laboratory, Imperial College London for a hybrid robot capable of both aerial and water surface locomotion. Aerial-aquatic mobility significantly facilitates applications involving aquatic sampling or underwater surveying. Water vehicles that can take flight can be rapidly deployed, access to remote areas, overfly obstacles and easily transition between separate bodies of water, while retaining the original mission purpose.
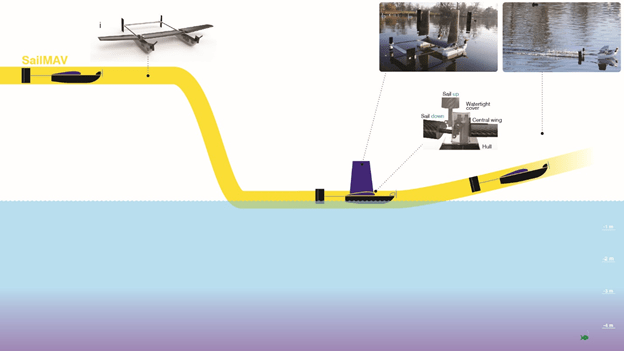
The SailMAV flies as a fixed-wing platform with a 0.9 m three-section wing and a flight range of 7 km. The carbon fiber asymmetric central wing provides high lift and stiffness, while the extremities have two degrees of freedom, i.e. angle of attack and folding angle. Once landed on the water surface, it leverages wind energy for passive locomotion, which is handled by a flight module developed on PX4. By lowering the sails to a horizontal position, the SailMAV reverts to flight mode. At 3 m/s velocity, the robot begins to hydroplane thanks to specially designed hulls, at which point the drag decreases sharply. Take-off occurs at a low velocity through the help of ground effect.
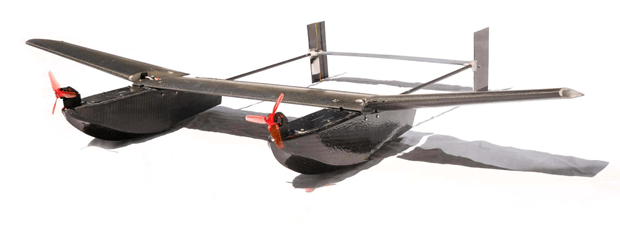
Recent developments have focused on the SailMAV’s sea and airworthiness. Structural components have been entirely built out of carbon fiber and foam layups, drastically decreasing its weight. In order to reduce part numbers and the weight penalty of watertight lids and closures, the fuselage is closed using the central wing and a custom designed PCB which houses all avionics and sensing payloads. This considerably improves the platform’s survivability to submersion and increases its lift to drag ratio by 33%.

Tests conducted at Silwood Park, Imperial College, at the start of 2020 showed that the platform can take-off with a considerable sensor payload, but that it suffers considerably with sea chop. New hull geometries have then been designed using computational fluid dynamics, to balance the compromise between stability in chop and maximum hydrodynamic lift. The team is planning its first field mission next year, where the robot will sample a lake of difficult access. Sampling is achieved by running water through a microfilter, which captures solid particles and biomass, thus avoiding the need to carry a large amount of water on the flight back. While is sailing mode, the robot will also acquire a temperature and turbidity profile across the length of the lake. These measurements can inform on pollutant contents in the water, and preemptively detect algae blooms and large erosion events.
For more information please visit:
https://www.youtube.com/channel/UCHlE99ZyN5Fcaor_odnLzyQ/featured
